Gestión de riesgos en sistemas de almacenamiento cúbico
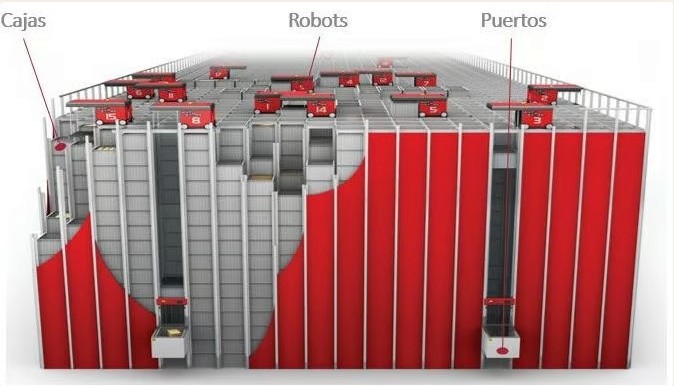
Los sistemas de almacenamiento en cubo pertenecen a la familia de los ASRS (Automated Storage and Retrieval Systems, sistemas automatizados de almacenamiento y recuperación). A diferencia de un almacén convencional, la mercancía no se guarda en estanterías recorridas por pasillos: se entierra bajo una rejilla por la que circula una flota de robots operando en enjambre. Esa arquitectura es la que dispara la densidad —y la que concentra el riesgo en cada metro cuadrado de grid.
El enjambre: por qué un solo robot bloqueado escala
La eficiencia del Cube Storage (arquitectura popularizada por AutoStore y sistemas equivalentes) se basa en que decenas de robots comparten una misma malla superior, accediendo a las cubetas mediante un movimiento vertical de extracción. No hay redundancia espacial: donde en un almacén convencional un pasillo bloqueado se rodea, aquí un robot detenido sobre la rejilla puede inutilizar un sector completo del grid y forzar el redireccionamiento de tráfico del resto de la flota.
El impacto no es lineal. Un robot inmovilizado sobre una celda crítica —por ejemplo, sobre uno de los pocos puertos de presentación (ports)— degrada el throughput de toda la instalación, no solo el suyo. En picos de actividad, donde el sistema trabaja cerca del 100% de su capacidad de presentaciones por hora, esa degradación se traduce de inmediato en pedidos que no salen dentro de la ventana de transporte.
Calibración de sensores ópticos y desgaste de ruedas
Los dos modos de fallo recurrentes en la flota tienen origen mecánico y optomecánico, y ambos son prevenibles:
- Ruedas y rodillos de tracción y de elevación. El robot alterna desplazamiento sobre los dos ejes de la rejilla y elevación de cubetas. El desgaste asimétrico de ruedas provoca pérdida de precisión de posicionamiento, vibración y, en última instancia, fallos de lectura de celda. Un programa preventivo mide el perfil de desgaste y sustituye por condición, no por avería.
- Sensores ópticos y de posición. La navegación sobre el grid depende de la lectura fiable de las marcas de referencia. Polvo, microdesalineación o degradación del emisor desplazan la calibración fuera de tolerancia. Un sensor que aún "funciona" pero lee con margen reducido es el preludio típico de un bloqueo en plena campaña.
La calibración no es una tarea de emergencia: es una rutina con frecuencia definida que debe ejecutarse dentro de una ventana de mantenimiento preventivo planificada, no improvisada cuando el robot ya ha caído.
La ventana de mantenimiento como activo, no como interrupción
El error de gestión más común es percibir la ventana preventiva como tiempo de producción perdido. En un sistema de enjambre es justo lo contrario: la ventana planificada es lo que evita la parada no planificada, que siempre llega en el peor momento y con un MTTR muy superior. Intervenir un robot dentro de una ventana programada cuesta minutos de una unidad; intervenirlo en caliente, durante el pico, cuesta capacidad de toda la flota.
Una política preventiva madura segmenta la flota y rota las intervenciones para que el sistema nunca pierda más de un porcentaje acotado de robots simultáneamente, preservando el throughput agregado mientras se mantiene cada unidad.
Asegurar el cumplimiento del SLA contratado
Cuando un sistema de cubos opera bajo un SLA de disponibilidad, conviene recordar la aritmética: un compromiso del 99% de disponibilidad equivale a unas 87,6 horas de parada permitida al año —pero esas horas no se reparten de forma uniforme. Si se concentran en la peak season, el SLA se cumple sobre el papel y se incumple en la operación real.
Por eso el cumplimiento de SLA en Cube Storage se gestiona con tres palancas medibles: elevar el MTBF de cada robot mediante sustitución por condición, reducir el MTTR con repuestos críticos en stock y procedimientos documentados, y desplazar las intervenciones fuera de las ventanas de máxima demanda. Sin datos de estos tres indicadores, el SLA es una promesa; con ellos, es un riesgo gestionado.
Conclusión operativa: en alta densidad, la tolerancia al fallo es baja por diseño. El mantenimiento preventivo de la flota —calibración óptica, control de desgaste y rotación planificada— no es un coste de servicio: es la condición para que la densidad que justificó la inversión siga siendo rentable.